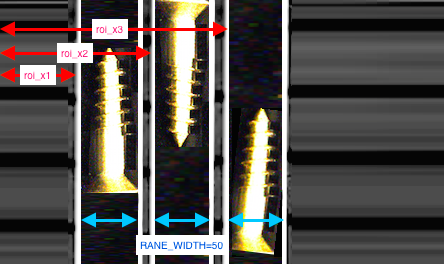
左右2つのROIを設定し、それぞれでテンプレートマッチングを行い回転を検出する
前回までは1つのROIを設定していました。今回は左右2つのROIを設定し、別々にテンプレートマッチングを行います。仮に右側のROIと左側のROIの進む速度が異なって検出されるのなら、カメラは回転しているということが推定できます。このようにして初期状態に対する現在進行する角度を計算し、この角度と回転行列を用いて移動速度をx =xcosθ-ysinθ、y’ =xsinθ+ycosθとして変換することで、座標推定をより厳密にしています。

#include "opencv/cv.h"
#include "opencv/highgui.h"
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
#define ROI_MARGIN_X1 (0.2*v_w)
#define ROI_MARGIN_X1_X2 (0.2*v_w)
#define ROI_MARGIN_Y (0.2*v_h)
#define ROI_SIZE_X ((v_w-ROI_MARGIN_X1*2-ROI_MARGIN_X1_X2)/2)
#define ROI_SIZE_Y (v_h-ROI_MARGIN_Y*2)
#define ROI_MARGIN_X2 (ROI_MARGIN_X1+ROI_SIZE_X+ROI_MARGIN_X1_X2)
double r(double x1,double y1,double x2,double y2){
return pow((pow((x1-x2),2)+pow((y1-y2),2)),0.5);
}
int main(){
VideoCapture cap("aerial.mp4");
int v_w=cap.get(CV_CAP_PROP_FRAME_WIDTH);
int v_h=cap.get(CV_CAP_PROP_FRAME_HEIGHT);
Mat img;
Mat result_img1;
Mat result_img2;
int d_x=0;
int d_y=0;
int position_x=0;
int position_y=0;
double angle=0; //右回りが正
//初回でのテンプレートマッチング用のROIを作成
cap>>img ;
Mat last_roi_img1(img,Rect(ROI_MARGIN_X1,ROI_MARGIN_Y,ROI_SIZE_X,ROI_SIZE_Y));
Mat last_roi_img2(img,Rect(ROI_MARGIN_X2,ROI_MARGIN_Y,ROI_SIZE_X,ROI_SIZE_Y));
int max_frame=cap.get(CV_CAP_PROP_FRAME_COUNT);
for(int i=1; i<max_frame;i++){ cap>>img;
//テンプレートマッチング1----------------------------------------------
matchTemplate(img,last_roi_img1,result_img1, CV_TM_CCOEFF_NORMED);
Point max_pt1;
double maxVal1;
minMaxLoc(result_img1, NULL, &maxVal1, NULL, &max_pt1);
//1つ目ここまで-----------------------------------------------------
//テンプレートマッチング2----------------------------------------------
matchTemplate(img,last_roi_img2,result_img2, CV_TM_CCOEFF_NORMED);
Point max_pt2;
double maxVal2;
minMaxLoc(result_img2, NULL, &maxVal2, NULL, &max_pt2);
//2つ目ここまで-----------------------------------------------------
//探索結果の場所に矩形を描画1
Rect roi_rect1(0, 0, ROI_SIZE_X, ROI_SIZE_Y);
roi_rect1.x = max_pt1.x;
roi_rect1.y = max_pt1.y;
rectangle(img, roi_rect1, Scalar(0,255,255), 1);
//次フレームでのテンプレートマッチング用のROIを保存1
Mat roi_img1(img,Rect(ROI_MARGIN_X1,ROI_MARGIN_Y,ROI_SIZE_X,ROI_SIZE_Y));
last_roi_img1=roi_img1.clone();
//探索結果の場所に矩形を描画2
Rect roi_rect2(0, 0, ROI_SIZE_X, ROI_SIZE_Y);
roi_rect2.x = max_pt2.x;
roi_rect2.y = max_pt2.y;
rectangle(img, roi_rect2, Scalar(0,255,255), 1);
//次フレームでのテンプレートマッチング用のROIを保存2
Mat roi_img2(img,Rect(ROI_MARGIN_X2,ROI_MARGIN_Y,ROI_SIZE_X,ROI_SIZE_Y));
last_roi_img2=roi_img2.clone();
angle-=atan((double)(max_pt1.y-max_pt2.y)/(max_pt1.x-max_pt2.x));
//位置推定
d_x=(ROI_MARGIN_X1-max_pt1.x)/2+(ROI_MARGIN_X2-max_pt2.x)/2;
d_y=(ROI_MARGIN_Y-max_pt1.y);
position_x+=d_x*cos(angle)-d_y*sin(angle);
position_y+=d_x*sin(angle)+d_y*cos(angle);
cout << "(" << position_x << ", " << position_y << ") angle = "<<angle<<endl;
imshow("Video",img);
waitKey(1);
}
return 0;
}