ダンゴムシやカニ、カマキリなどの昆虫の脚は何故あんなにも多いのでしょうか。
ヒトは2本の脚で歩きます。もちろん、そのためにサルとは違う進化をしてきました。確かに陸上において2本脚で歩くというのは実に不安定ですので、ヒト以外の多くの生物が2本脚を採用していません。それでもヒトが2本脚なのは、4本の脚を持つ哺乳類に属するという条件の中で、歩行における不安定さよりも歩きながら手で道具を扱えるメリットのほうが上回ったからだと考えられます。4本脚+2本の手という戦略は、哺乳類である人間には選択できなかったのです。鳥類も2本脚ですが、彼らは歩行よりも飛行に重きを置いているので歩行の不安定さは問題になりにくいのでしょう。
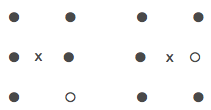
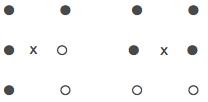
多くの生物が基本的には左右対称の構造を持っていますので、2本脚の次は4本脚の生物が考えられ、実際多くの哺乳類、爬虫類、両生類が4本脚です。安定に歩ける必要最小限の本数といっても良いでしょう。一般には3本以上の支点があり、重心が各支点を頂点とする多角形内部に存在すれば体を支えることができますが、4本脚動物の場合、その対称性から一つの脚が欠けた時に3点の支点を頂点とする三角形の辺上に重心が位置するようになります。したがって、安定に体を支えることは難しく、まして歩行は不可能とも言えます。(下の図は4本脚動物を上部からみた概略図で、⚫︎は欠けていない脚、⚪︎は欠けた脚、xは重心を示します。xが3つの⚫︎による三角形の辺の上にあるのがわかると思います。)

さて、どうやら6本以上の脚を持つ節足動物は、歩行の安定性というだけでは説明しきることはできません。なぜなら生物にはトレードオフの関係というものがあり、脚を増やすことによって、例えばたんぱく質などの貴重な資源をそこに費やさねばならなくなるからです。したがって安定な歩行のためであれば4本の脚は十分な数であり、それより多い数の脚を持つ生物は、しかるべき理由がなければ存在しないはずなのです。ではその理由は何か。それは脚の切断というような事故に対応できる能力、ロバスト性の保持にあると考えられます。4本脚の生物は脚が1つ無くなるだけで歩行はほぼ不可能となります。しかし6本脚の生物は1つの脚が無くなったとしても歩行することは可能です。残りの脚が構成する五角形の中に重心が存在するからです。
さらに、2本の脚が欠けた場合を考えます。この場合、安定に歩行できるパターンとそうでないパターンが存在します。
【安定なパターン】
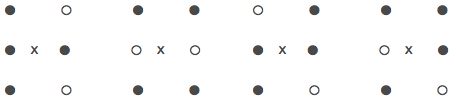
【安定でないパターン】
同様に3本の脚が欠けた場合でも、場合によっては安定に体を支持することができます。4本欠けるとさすがに無理ですね。このように、6本脚の生物には脚が多少かけてしまっても安定に歩行できるというメリットがあります。8本脚の生物なら、さらにこの効果は大きくなると考えられます。
さらに突き詰めて、どのような生物が6本以上の脚を持つのか。それは、脚欠損に対するロバスト性が必要な生物、すなわち、脚が欠けやすい生物ということであり、節足動物がまさしくこれに該当すると考えられるのです。4本脚の生物、すなわち、多くの哺乳類や爬虫類、両生類は内骨格を持つ生物ですので、外骨格を持つ節足動物に比べて脚が欠けてしまう可能性は低くなります。したがって、6本以上の脚を持つメリットがトレードオフの関係によりなくなってしまっているのだと考えられます。
まとめると、節足動物は外骨格ゆえに脚の欠損の可能性が高く、安定な歩行のロバスト性を高めるために6本以上の脚を持つと言えそうです。