画像から種子の数をカウントします。解析の種類としては、一般的には粒子解析と言われます。光の当たり方にムラのある条件でも可能な2値化手法など応用的な内容も含んでいますが、まず初めに実施してみてほしい簡単なチュートリアルです。Pythonで細胞をカウントする方法を解説したページはこちらになります。
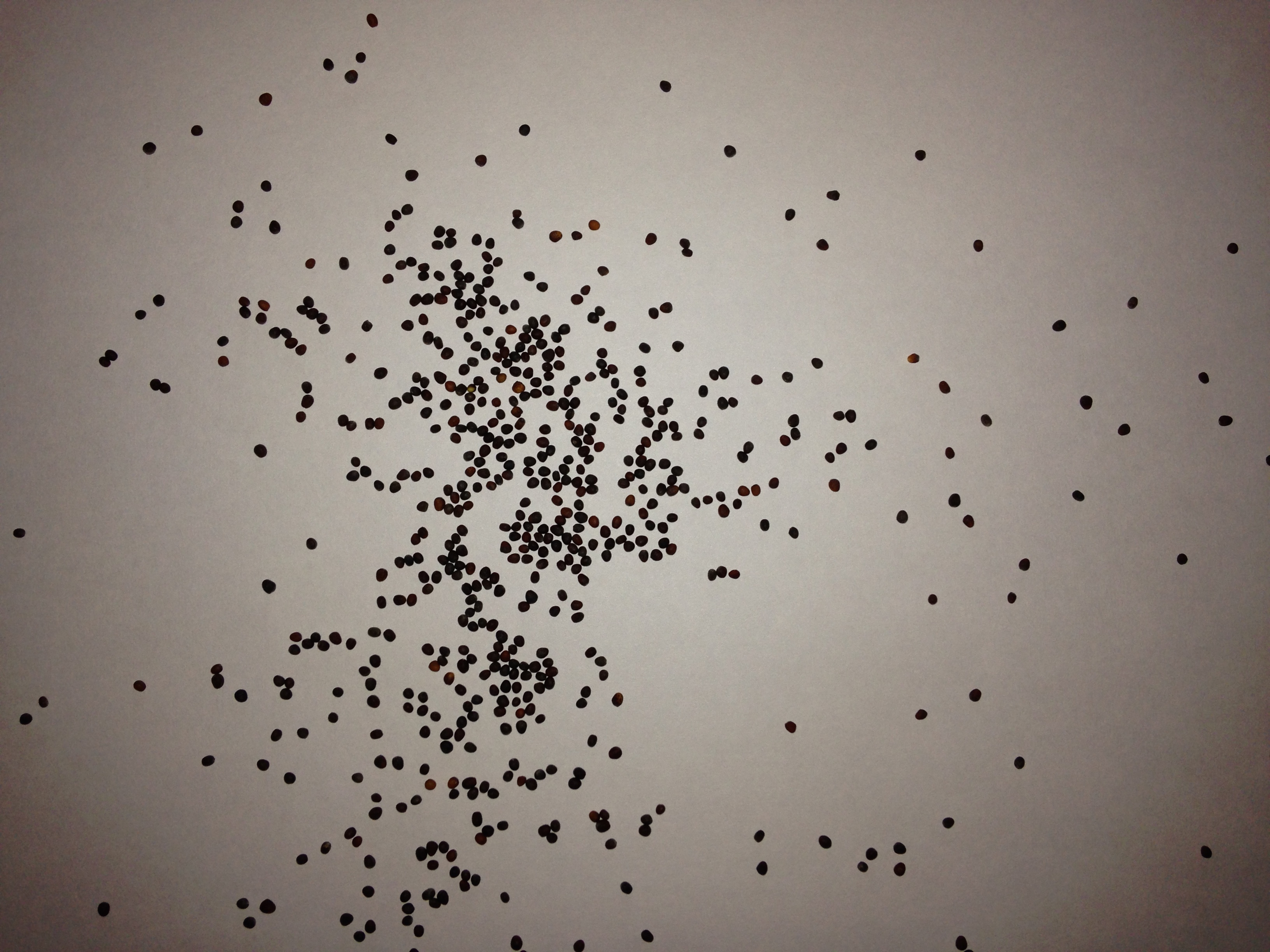
水菜の種子があったので、それをサンプルの画像として種子の数を数えます。このチュートリアルは、他にも顕微鏡で細胞を観察したときに核の数をカウントすること等にも応用が可能です。もし、自身でサンプルの写真を撮影する場合には背景が均一でカウント対象の物体とのコントラストの差ができるだけ大きいようにするのが良いでしょう。今回は四隅が暗く背景が均一でない画像を用意しました。あまり良い撮影条件とは言えず、ちょっとした工夫が必要になりそうです。